
Il controllo PR è una tecnica specificamente progettata per i convertitori di potenza al fine di mitigare l’effetto delle variazioni della frequenza della tensione di rete. Esso incorpora un filtro risonante che segue la frequenza della rete e regola di conseguenza i segnali di controllo. La legge di controllo PR può essere espressa matematicamente come segue:
u(t) = Kp * e(t) + Kres * sin(ωr * t) * e(t)
dove si è usata la seguente simbologia:
(i) u(t) rappresenta il segnale di controllo al tempo t;
(ii) Kp è il guadagno proporzionale;
(iii) Kres è il guadagno risonante;
(iv) e(t) è il segnale di errore, calcolato come la deviazione tra l’uscita misurata e il riferimento;
(v) ωr è la frequenza risonante (associata al segnale di riferimento).
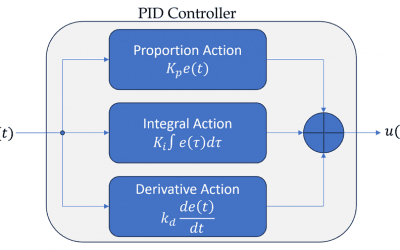
Il controller PR genera un segnale di controllo che comprende l’azione proporzionale e un componente sinusoidale alla frequenza risonante. Ciò consente al controller di seguire e compensare le variazioni di frequenza nella rete, rendendolo particolarmente utile in applicazioni come gli inverter connessi alla rete.
Il controllo PIR combina i vantaggi del controllo PID e PR incorporando sia azioni integrali che risonanti. È comunemente utilizzato nelle applicazioni dell’elettronica di potenza dove è necessario un tracciamento preciso del riferimento e la respinta alle perturbazioni. La legge di controllo PIR può essere rappresentata matematicamente come segue:
u(t) = Kp * e(t) + Ki * ∫e(t’)dt’ + Kres * sin(ωr * t) * e(t)
dove si è usata la seguente simbologia:
(i) u(t) rappresenta il segnale di controllo al tempo t;
(ii) Kp, Ki e Kres sono rispettivamente i guadagni proporzionale, integrale e risonante;
(iii) e(t) è il segnale di errore, calcolato come la deviazione tra il riferimento desiderato e l’uscita misurata;
(iv) ∫ e(t)dt è l’integrale del segnale di errore nel tempo;
(v) ωr è la frequenza risonante (associata al segnale di riferimento).
Il controller PIR combina le capacità del controller PID per gestire l’errore in stato stazionario e del controller PR per compensare le variazioni di frequenza. Ciò si traduce in una migliore performance di tracciamento e respinta alle perturbazioni nei convertitori elettronici di potenza. Questi algoritmi di controllo, PID, PR e PIR, svolgono ruoli fondamentali nella regolazione dei convertitori elettronici di potenza, garantendo stabilità, precisione e risposta alle condizioni operative dinamiche. Le loro formulazioni matematiche forniscono una base per la progettazione e l’implementazione di strategie di controllo nelle applicazioni dell’elettronica di potenza.
0 commenti