
INTRODUZIONE
Il protocollo CANopen rappresenta un importante standard nel campo delle reti di comunicazione industriali, ed è ampiamente utilizzato per il controllo e il monitoraggio di dispositivi e sistemi in una vasta gamma di applicazioni industriali. Questo capitolo fornisce un’introduzione al protocollo CANopen, esaminando i suoi principali concetti, caratteristiche e vantaggi.
Cos’è CANopen?
CANopen è una versione specifica del protocollo di comunicazione Controller Area Network (CAN), ottimizzata per applicazioni di automazione industriale. È stato sviluppato per semplificare la comunicazione tra dispositivi e sistemi all’interno di un ambiente industriale, consentendo il controllo e il monitoraggio efficienti dei processi industriali.
Caratteristiche Chiave di CANopen
Architettura Aperta: Una delle caratteristiche distintive di CANopen è la sua architettura aperta. Questo significa che può essere implementato su una vasta gamma di dispositivi e sistemi da diversi produttori, garantendo una maggiore flessibilità nell’integrazione di componenti di diversi fornitori all’interno di un sistema.
Comunicazione Basata su Oggetti: CANopen utilizza un modello di comunicazione basato su oggetti, in cui i dati vengono organizzati in oggetti logici chiamati “oggetti oggetto.” Questo approccio semplifica la gestione e la configurazione dei dispositivi, consentendo un controllo più preciso delle informazioni scambiate tra i nodi di rete.
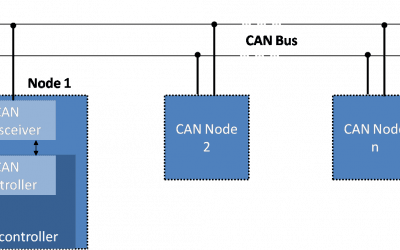
Nodi Intelligenti: In una rete CANopen, ogni dispositivo è considerato un “nodo intelligente” con funzionalità specifiche. Questi nodi possono essere configurati per eseguire una vasta gamma di compiti, come il controllo di motori, la raccolta di dati sensoriali o il monitoraggio di parametri di processo.
Profilo Dispositivo: CANopen definisce una serie di profili dispositivo standardizzati che semplificano l’implementazione di dispositivi specifici. Questi profili descrivono le funzionalità e i parametri di comunicazione dei dispositivi, facilitando l’interoperabilità tra prodotti di diversi fornitori.
Struttura dei Messaggi CANopen
Vantaggi di CANopen
Affidabilità: Grazie alla sua robusta tecnologia basata su CAN, CANopen offre una comunicazione affidabile anche in ambienti industriali rumorosi e soggetti a interferenze.
Scalabilità: La flessibilità di CANopen consente di adattare facilmente la rete alle esigenze specifiche di un’applicazione, aggiungendo o rimuovendo nodi in modo agevole.
Interoperabilità: L’uso di profili dispositivo standardizzati favorisce l’interoperabilità tra dispositivi di diversi produttori, semplificando l’integrazione dei componenti.
Efficienza: La comunicazione basata su oggetti consente un trasferimento efficiente dei dati, riducendo il traffico sulla rete e migliorando le prestazioni. Il protocollo CANopen rappresenta una solida base per la comunicazione e il controllo all’interno di applicazioni industriali complesse. La sua architettura aperta, la comunicazione basata su oggetti e la scalabilità lo rendono un’opzione ideale per una vasta gamma di scenari industriali, contribuendo all’efficienza e alla affidabilità dei processi di automazione.

Complimenti ottimo articolo!
Ottimo articolo esaustivo sul CanOpen.